Announcement
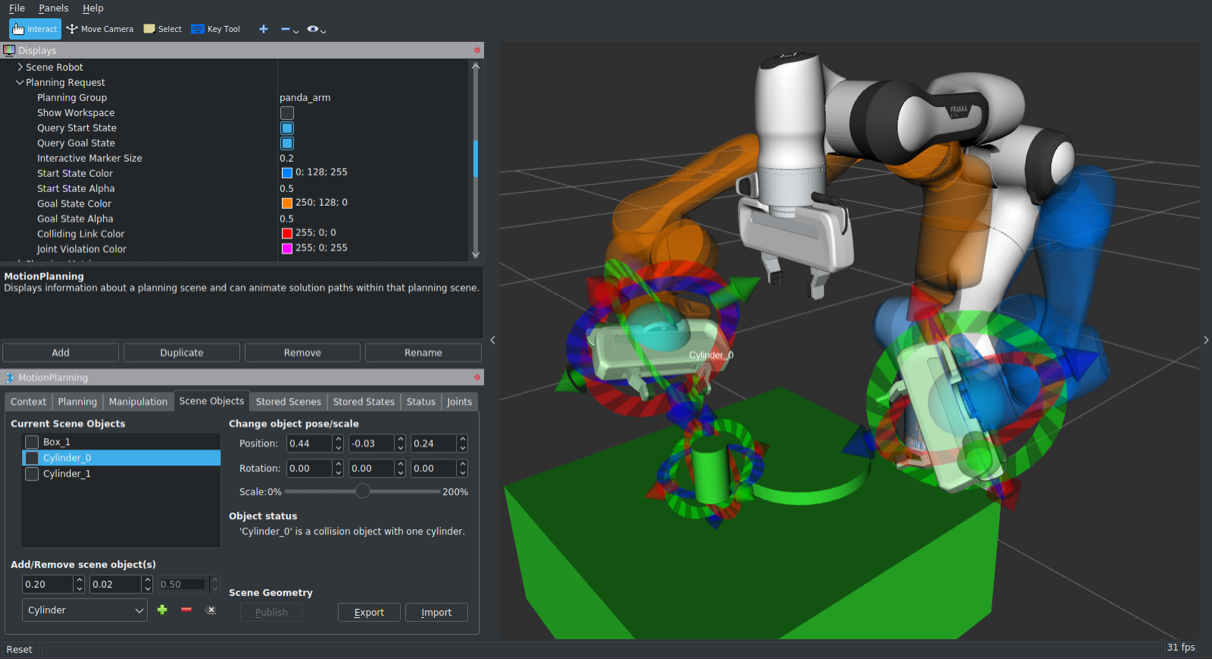
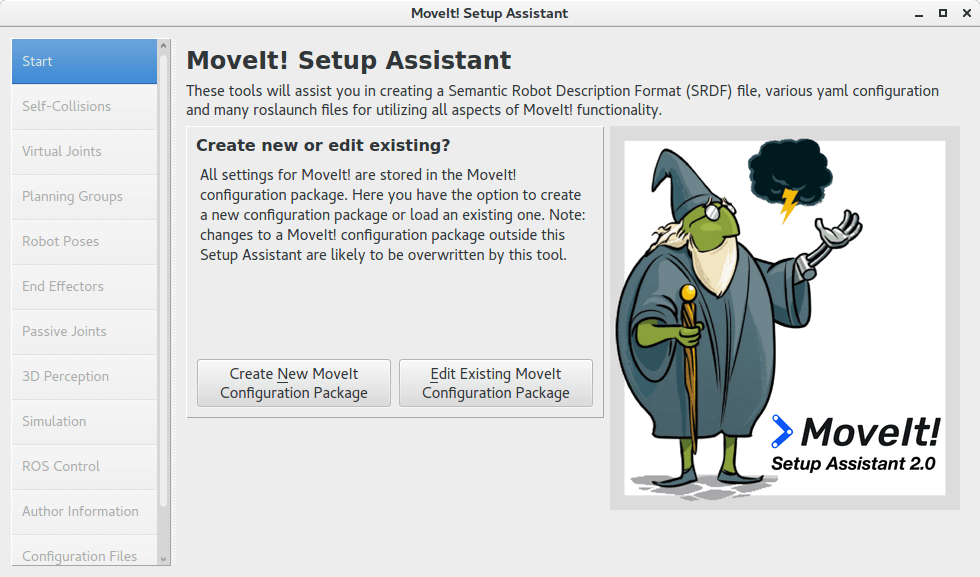
MoveIt Pro 2.0 and MoveIt 2.7 released!
Moving robots into the future
Incorporating the latest advances in motion planning,
manipulation, 3D perception, kinematics, control and navigation