MoveIt is open source and released under the BSD License v3 . Each individual file in the MoveIt source code should contain a copy of the license.
MoveIt code is hosted on GitHub in the moveit organization in the following repos:
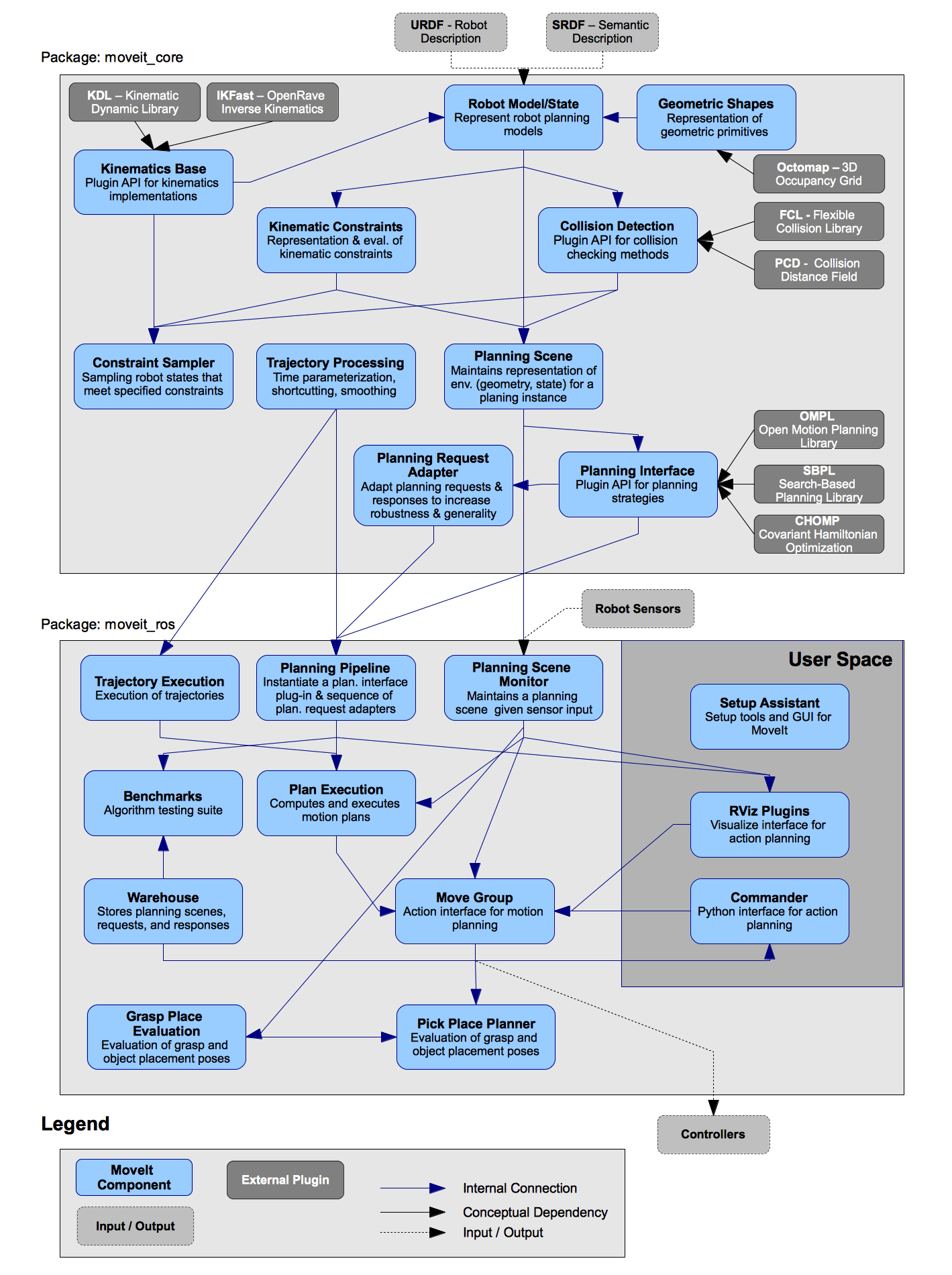
moveit - Main repo of MoveIt, contains the following packages:
moveit - Metapackage
moveit_core - Core functionality including RobotModel, RobotState, collision checking
moveit_ros_planning - planning components, execution manager, plugin loaders
moveit_ros_move_group - The move_group main node for using MoveIt via ROS messages
moveit_ros_planning_interface - Python and ROS msg interfaces to communicate with move_group
moveit_ros_perception - Octomap and other perception plugins
moveit_ros_manipulation - High level pick and place pipeline
moveit_ros_robot_interaction - Interactive marker tools for Rviz
moveit_ros_visualization - Rviz tools
moveit_ros_warehouse - Database plugins for storing scene and configuration data
moveit_ros_benchmarks - Benchmarking using PlannerArena
moveit_ros - Metapackage
moveit_planners - Metapackage
moveit_planners_ompl - Open Motion Planning Library plugin
moveit_commander - terminal-based control interface using Python-like syntax
moveit_setup_assistant - GUI for quickly setting up MoveIt
moveit_plugins - plugins for controller managers
chomp_motion_planner - Gradient Optimization Techniques for Efficient Motion Planning
chomp_interface - adapter for using CHOMP with MoveIt
moveit2 - The beta version of MoveIt for ROS 2moveit_msgs - ROS messagesmoveit_task_constructor - An approach to hierarchical, multi-stage manipulation planningmoveit_grasps - A geometric-based grasp generation library for manipulationmoveit_visual_tools - display and debugging data in Rvizmoveit_resources - large file assets such as testing robotsmoveit_calibration - hand-eye calibration routines with GUImoveit_advanced - Experimental advanced capabilitiesmoveit_ci - script to run with Travis for continuous integrationrqt_moveit - Plugin for the GUI framework of ROS, RQTsrdfdom - Semantic Robot Description Format used exclusively by MoveIt
Dependencies maintained by the MoveIt team:
The following repos are where documentation can be found:
We use Travis continuous integration combined with the moveit_ci for testing pull requests and overall code health. Travis status badges should be visible on the README.md of every MoveIt repository.
To see an overview of the activity for MoveIt check our Open HUB Project Summary .
This API is meant for advanced developers. Most users should use the Move Group interface (above).
Planning - The planning components in MoveIt ROS, especially the planning scene, kinematics and monitorsMove Group - The move_group_node Perception - The perception components in MoveIt ROSRobot Interaction - The Interactivity components in MoveIt ROS
This API is meant for advanced developers. Most users should use the Move Group interface (above).
Core - The core components in MoveIt for kinematics, planning scene, constraints, motion planning, collision checking and plugin interfaces
This API is meant for advanced developers. Most users should use the Move Group interface (above).
OMPL Interface - The set of classes that allow MoveIt to talk with OMPL.