
Robowflex for MoveIt
Zak Kingston presented Robowflex, a high-level C++ library for MoveIt, at the 2022 MoveIt Community Meeting. He describes how Robowflex has supported motion planning research and can be used to benchmark motion planning algorithms. Zak is a postdoctoral research associate and lab manager for the Kavraki Lab at Rice University under the direction of Dr. Lydia Kavraki. He graduated with a Ph.D. in Computer Science from Rice in December 2021. His research interests lie in algorithmic robotics, focusing on robot manipulation planning and planning with constraints.
Zak’s work on Robowflex is available here! Robowflex makes using MoveIt simple and has been used in a number of publications. Take a look at the associated paper and documentation online.
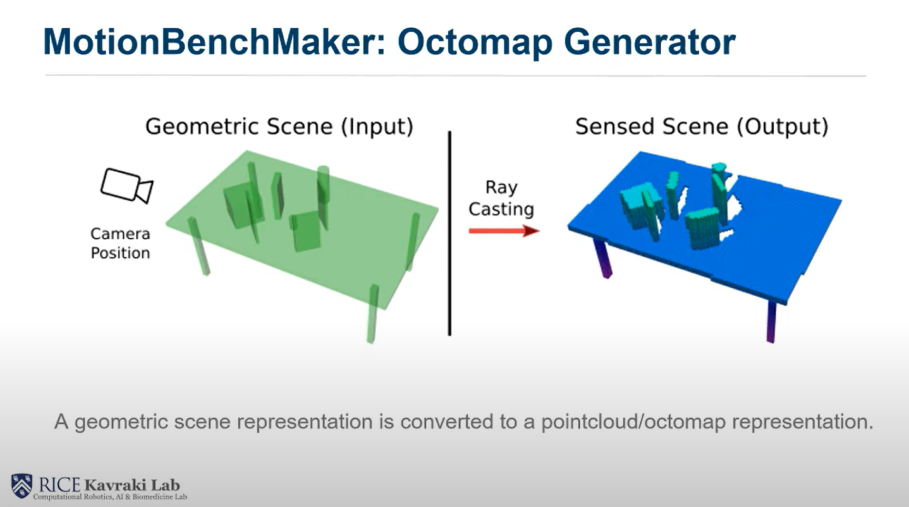
Zak will also talk about MotionBenchMaker, a tool to generate datasets for motion planning, and contains pre-generated realistic datasets for evaluating planning. MotionBenchMaker is available here. Take a look at the associated paper. You can find out more about Zak on his website.